Trasmissione a coppia
Trasmissione diretta tipo LTD
609818

Descrizione
Materiale
Temperatura di esercizio
Posizione di montaggio
Lubrificante
Opzioni
| Precisione | |
| Velocità | |
| Gamma Ø | |
| Prezzo |
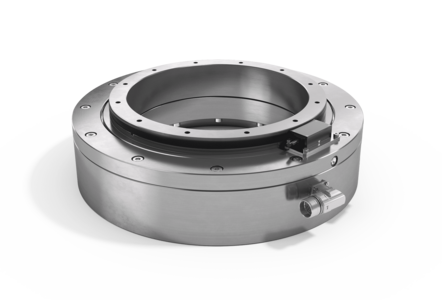
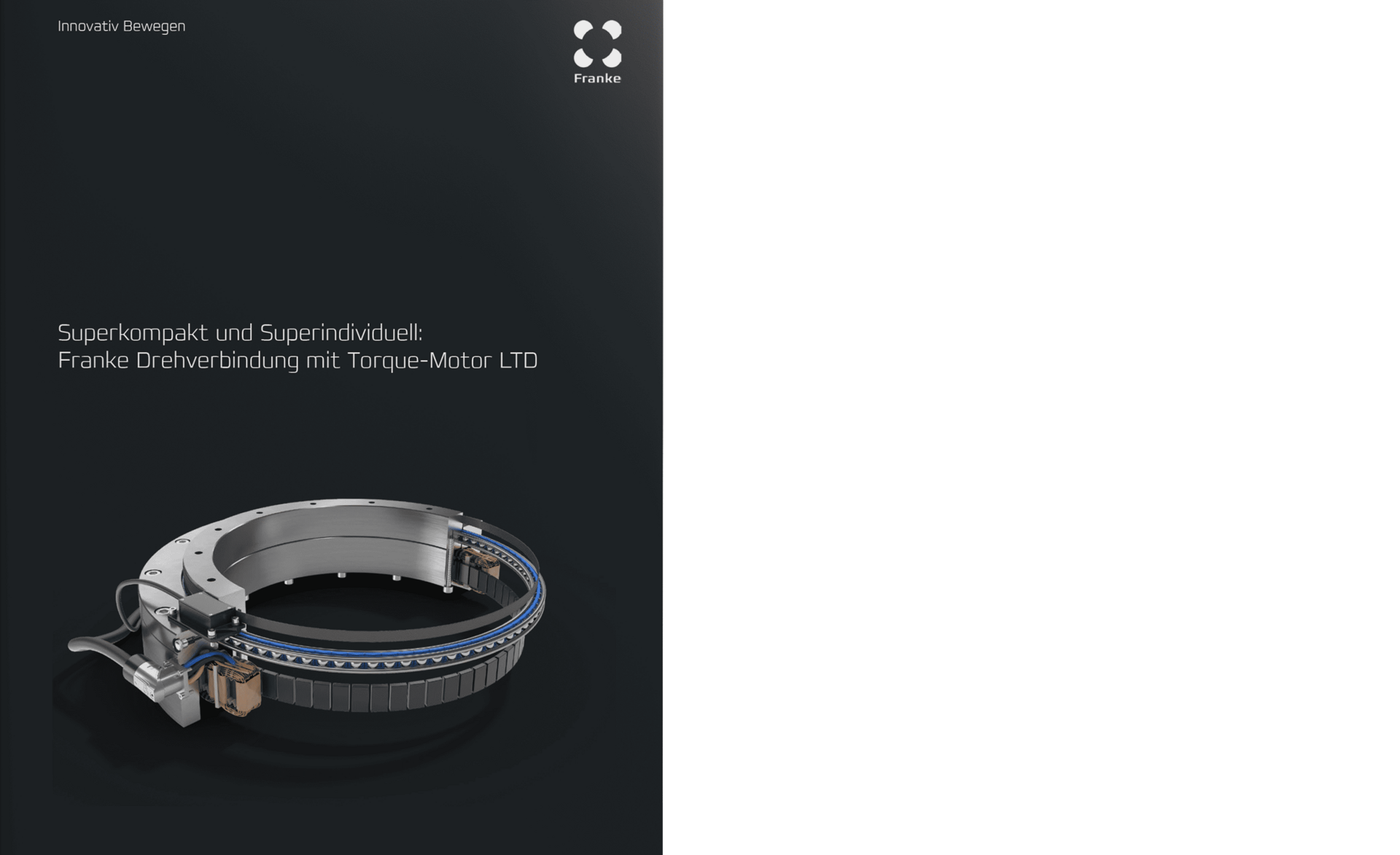
Super compatto e super individuale: Cuscinetto assemblato Franke con motore torque LTD
Dati di base
- Steruttura in acciaio o alluminio
- Diametri da 100 a 1800 mm
- Sistema di misurazione incrementale
- Sistemi di misurazione assoluto
I vantaggi
- Design compatto
- Grande spazio centrale
- Libera scelta dei componenti
- Quattro misure standard
- Soluzioni personalizzate
Funzionalità e vantaggi:
Compatto
Dinamico
Efficienza energetica
Design compatto, grande spazio centrale
I gruppi di cuscinetti Franke con azionamento diretto integrato (motore dinamometrico) sono caratterizzati da un'elevata dinamica, la massima efficienza energetica e uno spazio di installazione compatto combinato con un design privo di centro.
I cuscinetti assemblati con azionamento diretto LTD sono certificati per l'uso in camere bianche


Diametri disponibili
I cuscinetti Franke con azionamento diretto sono disponibili in diametri da 100 mm a 1.800 mm.
Tabella dati

| Tabella 1 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Nome | ΚΚØ mm | Capacità di carico kN | Coppia Nm | Potenza A | Velocità di rotazione 1/min. | Peso kg | |||||
| C0a | C0r | Ca | Cr | MNenn | MPeak | INenn | IPeak | nmax | |||
| LTD-0100 | 100 | 46 | 22 | 17 | 14 | 4,5 | 16 | 1,8 | 7 | - | 8 |
| Dati nominali | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Prodotto | MNennLk | INennLk | nNennLk | PNennLk | PVNennLk | PGNennLk | MHaltLk | IHaltLk | |||
| Nm | Aeff | U/min | W | W | W | Nm | Aeff | ||||
| LTD-0100 | 4,5 | 1,8 | ? | 1005 | 54 | 96 | 3,2 | 0 | |||
| Dati a carico di picco | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Prodotto | MPeak | IPeak | nPeak | PPeak | PVPeak | PGPeak | |||||
| Nm | Aeff | U/min | W | W | W | ||||||
| LTD-0100 | 16 | 7 | 1130 | 1897 | 863 | 877 | |||||
| Resumeto delle prestazioni | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Prodotto | kt | ke | ke | km | nLeer | nmax | fmax | Uzk | RPh20 | ||
| Nm/Aeff | Veff/(rad/s) | Veff/(U/min) | Nm/vW | U/min | U/min | Hz | VDC | Ω | |||
| LTD-0100 | 0,459 | 1,577 | 0,165 | 0,459 | 2390 | - | 398 | 560 | 4,419 | ||
| Sistema di misura | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Prodotto | Principio di misura | Marca di riferimento | Lunghezza del cabile | Periodo di divizione | Numero di righe | Alimentazione | Connessione elettrica | ||||
| LTD-0100 | induktiv | 1 Referenzmarke | 1 | 1000 | 256 | 4V bis 7V DC | Flanschdose M23 | ||||
LTD-100

I miei contatti per questo prodotto
Il tuo contatto locale
HTC Srl
Via XXIV Maggio 40
10082 Cuorgnè TO
Tel.: +39 0124 65 19 16
info@htcfranke.it
Whitepaper azionamento diretto con motore torque
Scoprite nel nostro whitepaper perché una ralla con coppia integrata è superiore ad altri tipi di azionamento sotto quasi tutti i punti di vista.
Evitare di utilizzare in futuro componenti come riduttori e pignoni di trasmissione.

Lasciatevi consigliare!
Da un esperto Franke tramite chat video, sul tuo sito o presso la nostra sede.